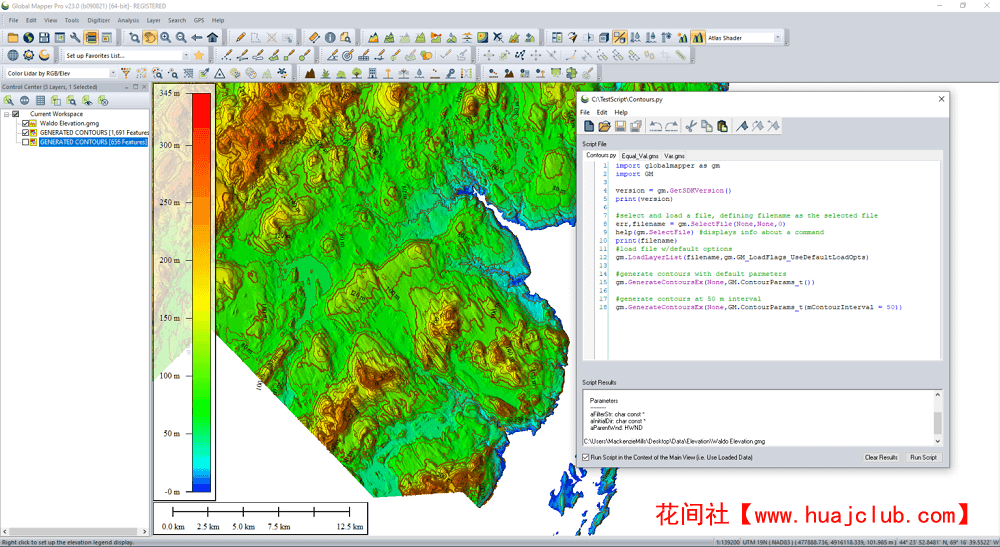
����ʱ�䣺2025-03-04 11:51:14���������636+��
Global Mapper ��һ�������� Blue Marble Geographic ��˾�з���רҵ��ͼ�����������ߣ�ʹ������ͼ���������������û�������Ƴ��Լ���Ҫ�ĵ�ͼ�������Խ�SRTM��������ʾΪ��դ��ͼ���̵߳�ͼ��ʸ����ͼ�������ԶԵ�ͼ���б༭��ת������ӡ����¼GPS���������ݵ�GIS���ܣ�ӵ�ж���ǿ��ĵ�ͼ���ƹ��ܣ�������3Dʸ��/�����״����ݴ����߳��������ص�դ��/����/��ͼ/���ȣ��dz������ڵ���������ҵ���ʺϵ�·��ҵ���ʺϵ��ʽṹ������ҵʹ�á�
���һ�� GIS ����
Global Mapper Pro? ��һ��ȫ��������ʹ�õ� GIS Ӧ�ó�����Ϊ���ݴ������༭���� 2D �� 3D ���������ڹ������Զ����Ľű������Լ��㷺���ļ���ʽ֧���ṩ�˹㷺�Ĺ����ϡ�Global Mapper Pro �������ǰ���������۵ļ����״�ģ�����ṩ�����е��ƴ������ܣ�Ϊ�û��ṩ�������µĺ���ǿ�����ݴ����ͷ������ߡ����¹��ܽ��� Global Mapper Pro �п��ã�����ıȽ�ͼ����ʾ�˸������� Pro �� Standard �汾�п��õĹ��ܺ���
���ص�������˻����ݴ���
ʹ��Global Mapper Pro �е�Pixels to Points���߿������ɵش����˻��� UAV �ռ���ͼ���д��� 3D ���ƺ��������ݡ�ʹ���˶������еĽṹ�Լ����ӵ�����Ƶ������λ�þ��ȵĻ��ᣬ�ù��ߴ�һ�����˻��ռ���ͼ�������� 3D ���ơ�����Ӱ�������
�����״����ݱ༭
�����ֶ����Զ��������Global Mapper Pro �ṩ�˶� 3D �������ݽ�����ȫ����Ļ��ᡣ�Զ����桢�������ľ�������ߺ͵��߸˷����������ȡ���߿����ڼ����״����Ӱ�������ɵĵ������ݡ�
ͨ�� 2D��3D ��·��������ͼ�п��õĸ���ѡ�������Ը��ĵ㷵���ࡢ�̺߳����ԡ��������빤�߿����ɴ�������ͼ�������û�̽���ص������״�����֮��Ĵ�ֱ���롣ͨ���ֶ�У������ڿ��Ƶ���ص���������ǿ���� 3D λ�õĸ��ӹ����ṩ��һ�����������м����״����ݴ����Ĺ��ߡ�
ͨ����ͼ�������е��Ʒָ�
�ù��߸������ԺͿռ����Ե������Խ����ƻ���Ϊ��ء��û�����ѡ���ڽ����ݼ�����Ϊ��ʱ������Щ���ԣ���ָ����Щֵ����Ҫ�ԡ��ָ�����Ľ����һ�����ƣ��õ��ƾ��з����������ÿ����ʶ��ε�Ψһ ID��Ȼ�����ͨ������Ķ� ID ֵ����Щ�������ɫ���Ա��������ʾ����������ù��ߵ�����ԺͿɶ����ԣ����ѡ��ͱ༭�����ε�ѡ�������Ľ����ֶ����࣬�ڰ��Զ���������ʵ���Զ�����Ʒ��ࡣ
�Զ������ߴ���
�ù����ܹ����ֵ����¶Ȼ����ʵ����Ա仯��������Щ��Ե��ȡΪ 3D ʸ�������ߡ����ݷ�����Ŀ�꣬�˹������ṩ�����ָ������
������ 1.)��б������߽紦���Ҹ��������ʺ���ȡƽ̹������Χ�ĸ����ߣ�����ˮ��ѹ���ˮ�����ԭ��
2.)���Ҿ��������¶ȵ������Ե��Χ�ĸ��������û������������ֵ���з������ڶ�����������ֵ�ڵ���������Ӱ�����Χ����������������
3.)���κα�����Ѵ����Ҹ����߲鿴���ʷ�����ʶ�����ݼ������ʼ�ֵ�㴦�ĸ����ߡ��˷�����������ɽ����ɽ�������ߡ�
���λ滭
ʹ�õ���ģ�͵ı��棬���λ��ƹ����ṩ��һ�ַ���ķ�ʽ���ı䡢��ǿ�����ӵ���������Terrain Paint �˵������û�����϶��ƽ�����Ρ����ߺͽ��͵��εȵȡ�
�ű��������ͽű��༭��
Script Builder ���߽��ڳ����û�������ִ�еIJ���ת��Ϊ��������ʹ�õļ�¼��ť��ȫ��ӳ�����ű����
�����ֶ��ű��������༭��ִ�У�����ʽ�ű��༭�������û���ѡ�ʽ�����д���ű��������������ǡ�ͨ���ij���������ѡ����ɫ������飬�ű��༭������ظĽ��˽ű��� Global Mapper �����еĽ�����ʽ��
Python ������Լ���
���� Python v3.9��Global Mapper �û����ڿ���ʹ��Python��������ڳ������Զ����������������滻Global Mapper Script���������ӵ��ű�����ѡ�Python �ű��������µĽű��༭���л� Global Mapper ֮���д������ Global Mapper �����ڡ�ͨ�������л��� Python ���������С�
�����
ǿ��ı��Ϳ���������߸Ľ��� Global Mapper Pro �е�����Ԥ�⡣��ȫ�Զ������ݲ����ͱ��캯��ͼ����ȷ�����ʺ����ɿ����Ԥ��������ģ�͡�
ȫ�� Mapper �ƶ�����
�� Global Mapper Pro ��Ե��� Global Mapper Mobile������һ�������� iOS �� Android ��Ӧ�ó��������ֳ����ݲο����ռ���ͨ�� Global Mapper ������ƶ����ݹ�������ֱ�ӽ��������߹������ƶ��豸�����⣬ͨ���˹��ߣ����Ժϲ� Global Mapper Mobile Package �ļ�������ɲ�ͬ�ֳ��ɼ������������ݼ���
դ�����ݵ��Զ�ʸ����
�µ�ʸ����դ��ƥ�����������ɫ��߳�ֵ�����أ�����������Щ����Ϊ�߽������Ϊ��ȥ���������������������Ե��Ȼ������û�������ֵ����������ƽ��������������ʸ��������ʱ���û�������ȫ���ƹ���ִ�е�һϵ�в��衣
�Ӽ����״����ɵĸ߳�ģ�ͺ͵ȸ���
Global Mapper Pro �����ڴ����߳��������չ����ʹ�û��������ɵش� 3D ���������������ֵ���ģ�� (DTM) �����ֱ���ģ�� (DSM) ͼ�㡣ͨ��ָ��������������ֵ���롢����˺�����ֱ��ʵ�ѡ��û�������ȫ���Ƶ��α���Ĵ�����
�������ɹ�����չΪֱ�Ӵ� 3D �����������������ߡ�������Ӧ���ڵ��Ƶĸ�����ѡ��������ɹ��ߴ����������� 3D �ߣ��������ɵ��Ʊ�ʾ�� 3D ������
������������
ʹ���������������ǿ�����������Ĵ��������Դӵ㡢�ߺͶ���δ���Բ�������λ�ܵ������������������Ҳ����ʹ�ö��ֲ�ͬ�ķ����ӵ��ƴ�������Щ���������Ͳ�ֵ�Դ�����ϸ����������������α��档
ע�⣺
Winϵͳ��ѹѹ�������Ҳ���������ߡ��͡����������������
���������ҵ������İ�װλ�ã���װĿ¼��
�����Ѷ